Pneumatic Haptic VR Glove
I have been looking at creating a force-feedback VR glove. I think this sort of peripheral will be the next step in immersion for VR. There are several companies making VR glove that rely on vibration motors to tell the user when they are touching a virtual object but in my view this design is less immersive than holding a physical controller.
There are a few companies working on VR gloves with real force feedback, such as HaptX, VRgluv and Dexta, though some may only provide variable resistance to moving and not the ability to actually pull or push the user's fingers.
My take on the force feedback VR glove is based on pneumatics as I see several benefits:
A pneumatic piston can deliver a strong force very quickly.
The compact size of the cylinder means they can be mounted on each joint, instead of relying on cables from the actuator to the joint. This also means the joints can act independently which makes the control system simpler.
A double ended piston can provide force in both directions, i.e. keep the user's fist closed as well as preventing it from closing. This extra functionality likely won't be necessary for most users but may be supported on an enhanced version of the glove.
It requires more force to squeeze already-compressed air than to allow it to expand. This means the wearer can release their grip on a virtual object naturally. A system which locks the joint completely would need to read the user's intent to release their grip and unlock the joint.
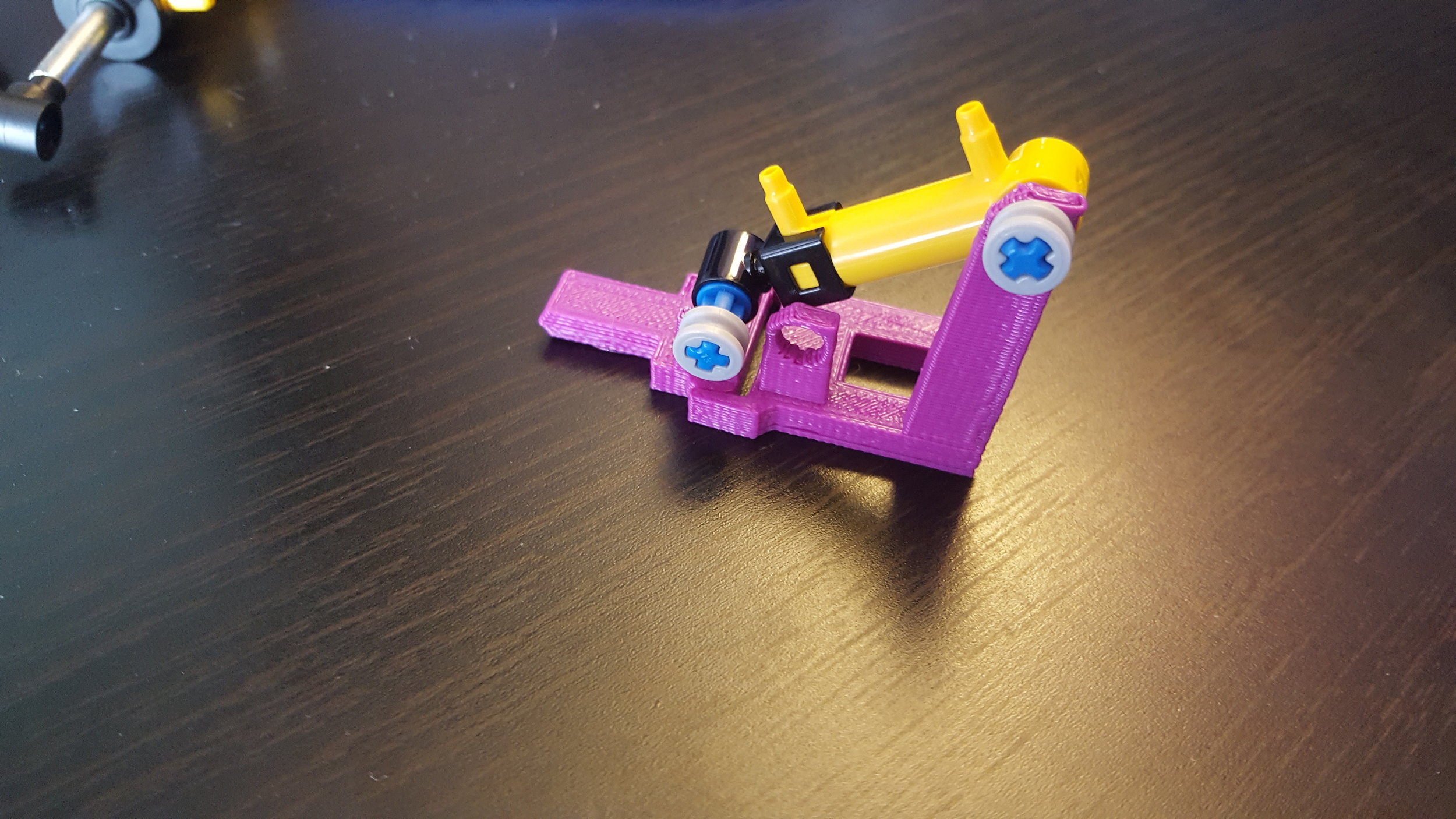
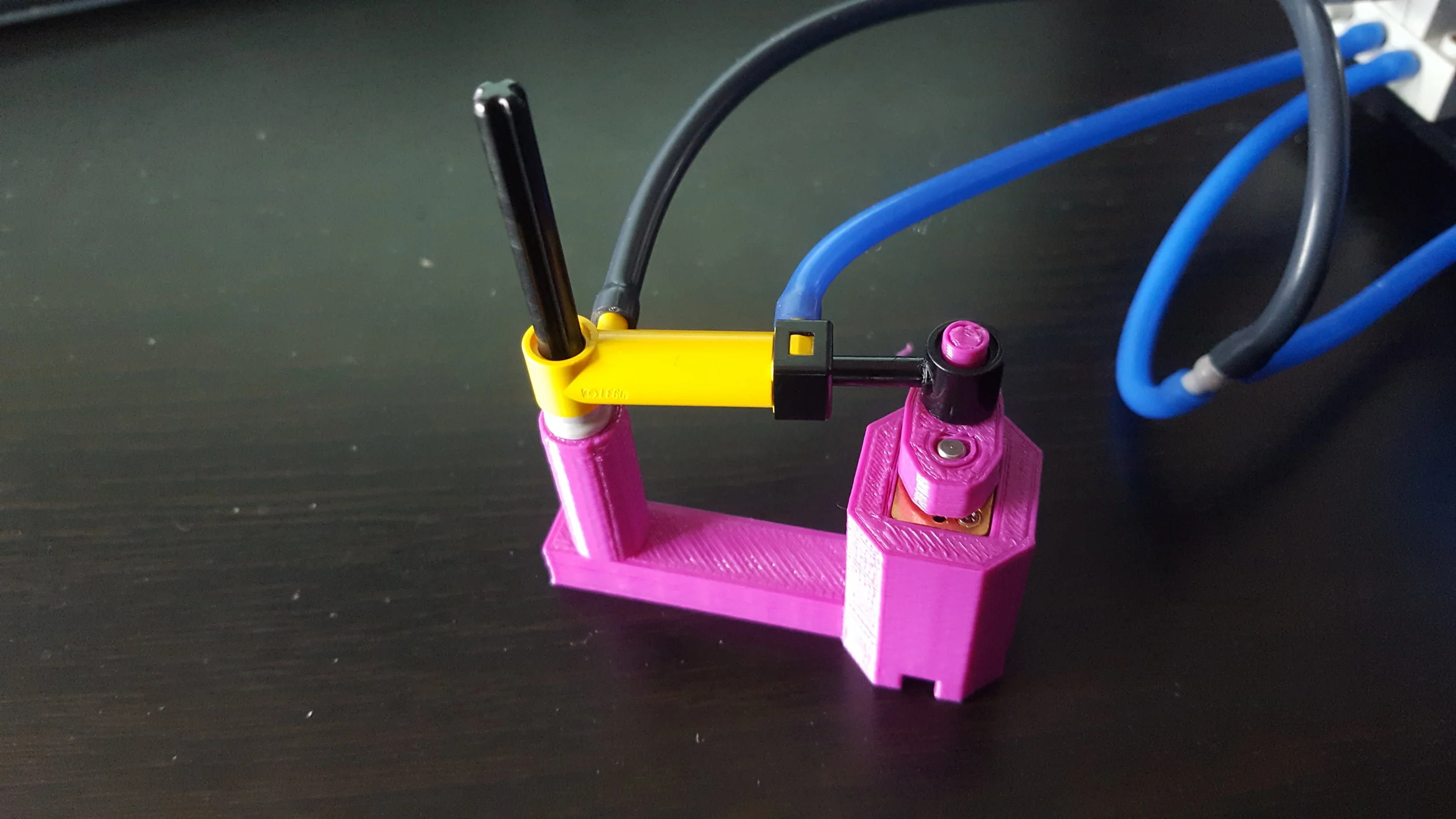
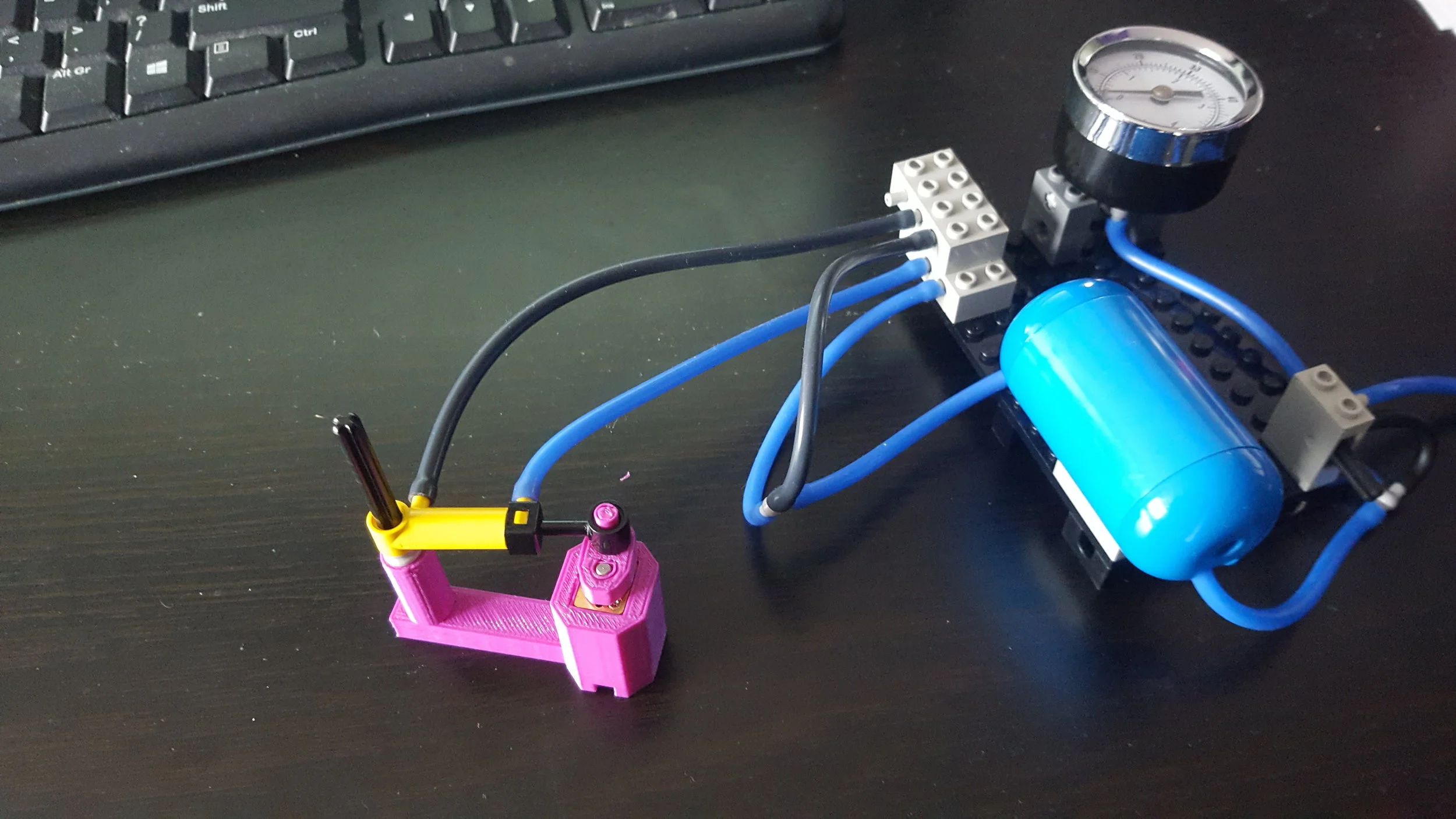
And the easiest way to prototype with pneumatics? Lego Technic :)
Updates are posted @FulbyTech and in the blog linked below.
Blog posts


Videos










Images
See blog posts for more images